4.1: euklidisk geometri
definitioner
vinkel: \(\measuredangle ACB\). Normalt mäts vinkeln i grader (\(^0\)) eller i radianer rad).
rätvinklig vinkel: vinklar som mäter 90 kg – \(\measuredangle ABC\)
trubbig vinkel: vinklar som mäter > 90 kg – \(\measuredangle CDE\)
spetsig vinkel: vinklar som mäter < 90 kg – \(\measuredangle FDE\)
rät vinkel: vinklar som mäter 180 KG \(\measuredangle CDF\)
reflexvinkel: En reflexvinkel är en vinkel, som mäts > 180 kg, vilket lägger till en vinkel för att göra 360 kg – \(\measuredangle CDE\) reflexvinkel är \(\measuredangle CDF + \measuredangle FDE\)
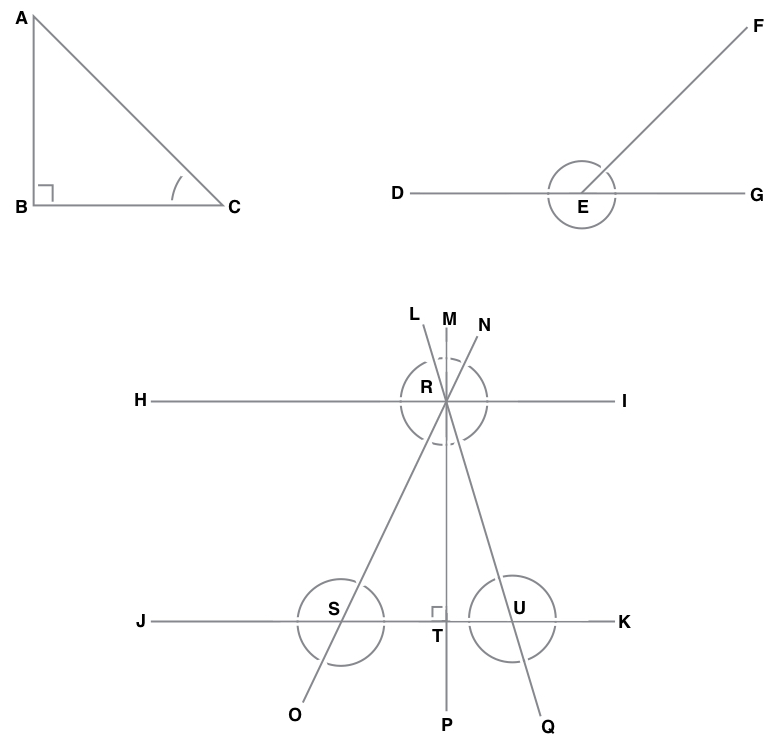
intilliggande vinklar: har samma vertex och dela en sida. \(\measuredangle HRL,\, \ measuredangle HRO\) ligger intill.
komplementära vinklar: Lägg till upp till 90 kg. \(\measuredangle PRQ,\, \ measuredangle QRI\ ) är kompletterande vinklar.
Tilläggsvinklar: Lägg till upp till 180 kg. \(\measuredangle JSN,\, \ measuredangle NSK\) är kompletterande vinklar.
vertikala vinklar (X-egenskap): vinklar som delar linjesegment och vertexer är likvärdiga. \(\measuredangle JSR,\, \measuredangle OST\) är vertikala vinklar. De delar samma gradvärde.
motsvarande vinklar (f-egenskap): vinklar som delar ett linjesegment som skär med parallella linjer och är i samma relativa position på respektive parallelllinje är ekvivalenta. \(\measuredangle IRQ,\, \ measuredangle KUQ\) är motsvarande vinklar. De delar samma gradvärde.
alternativa inre vinklar (Z egenskap): Vinklar som delar ett linjesegment som skär med parallella linjer, och är i motsatta relativa positioner på respektive parallell linje, är ekvivalenta. \(\measuredangle HRS,\, \ measuredangle RST\) är alternativa inre vinklar. De delar samma gradvärde.
Bisecting an Angle: att dela en vinkel är att dra en linje samtidigt linje genom vinkelns vertex som delar vinkeln exakt i hälften. Detta är möjligt med hjälp av en kompass och en omärkt rak kant.
Trisecting en vinkel: Att trisektera en vinkel är att använda samma procedur som att dela en vinkel, men att använda två linjer och dela vinkeln exakt i tredjedelar. Detta är en gammal omöjlighet-det är omöjligt att åstadkomma med hjälp av en kompass och en omärkt rak kant.
Leave a Reply